Kompatybilność, czyli inaczej w rozumieniu funkcjonalności programu MapGO, to takie dopasowanie polegające na połączeniu ze sobą stopów oraz pojazdów. Tzn. to planista, a nie algorytm, decyduje, które konkretnie pojazdy powinny odwiedzić konkretne stopy. Działanie algorytmu optymalizacji tras jest w tym przypadku w pewnym stopniu ograniczone przez zasadę narzuconą przez operatora planującego dzień kierowcom.
Aby funkcja ta została uruchomiona, podczas tworzenia Projektu optymalizacyjnego należy wybrać stosowny typ kompatybilności. W opisywanym przypadku będzie to Kompatybilność stop-pojazd:
Do poprawnego przeprowadzenia optymalizacji tras z ograniczeniem Kompatybilności stop-pojazd należy właściwie przygotować plik z adresami (xlsx), który będzie w następnym kroku importowany do projektu optymalizacyjnego. Plik ten, powinien wówczas być wyposażony o dodatkową kolumnę, dotyczącą nazwy pojazdu. Na etapie tworzenia tego pliku xlsx, użytkownik przyporządkowuje do konkretnych stopów (adresów) pojazdy, które konkretne adresy mają obsłużyć (odwiedzić). 1 adres = 1 pojazd.
W importowanym pliku nazwy pojazdów powinny być identyczne ze zdefiniowanymi w programie pojazdami. Oczywiście wszystkie pozostałe, konieczne kolumny powinny być właściwie dopasowane, tak aby odbyło się poprawne geokodowanie stopów (naniesienie na mapie w odpowiedniej lokalizacji).
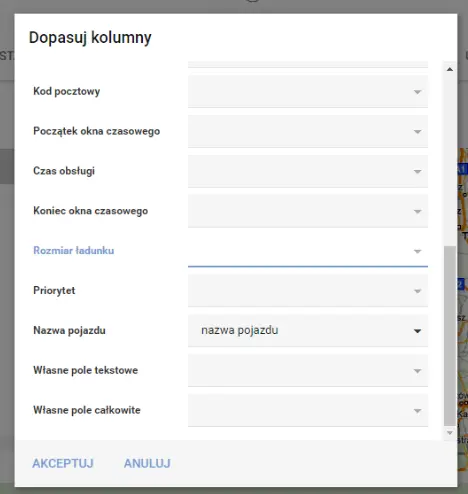
W momencie importu pliku ze stopami xlsx, powinniśmy sparować nową kolumnę naszego pliku z nazwami odpowiednich pojazdów, z kolumną odpowiadającą temu w programie:
W dalszym kroku Pojazdy, przy wyborze pojazdów do projektu należy się upewnić, czy są to te, które wybraliśmy w pliku xlsx do obsługi zleceń i czy ich nazwy są zgodne z nazwami w pliku xlsx. Jeżeli do projektu użytkownik wybierze pojazdy występujące w programie MapGO, ale ich nazwy nie pojawiają się w wybranych do projektu stopach, to stopy te nie zostaną obsłużone w ogóle. Trafią do puli Punktów nieobsłużonych.
Oprócz Kompatybilności stop – pojazd, obecnie w programie MapGO są jeszcze 2 alternatywne rodzaje kompatybilności: stop – baza oraz stop – cecha. Każda z nich działa indywidualnie i zawęża zakres działania optymalizacji tras według wskazania planisty.